Prestazioni e Limiti
degli UAS
Come funziona il tuo drone: architettura, batterie, motori, sistemi di controllo e dispositivi di sicurezza.
Sezione 1
Tipologie di UAS
Gli UAS (Unmanned Aircraft Systems) si dividono in tre grandi famiglie in base alla loro architettura di volo. Ciascuna ha caratteristiche operative, vantaggi e limiti ben precisi che il pilota deve conoscere.
📌 Configurazioni multirotore
I multirotore si distinguono per il numero di bracci/rotori: Quadricottero (4 rotori — il più comune), Esacottero (6 rotori — maggiore ridondanza, può sopravvivere alla perdita di un motore), Ottocottero (8 rotori — massima ridondanza e portanza, usato per payload professionali pesanti). La configurazione X è la più comune, la + meno frequente.
Sezione 2
Batterie LiPo: Gestione e Sicurezza
Le batterie ai polimeri di litio (LiPo) sono la fonte di energia quasi universale nei droni consumer. Offrono un eccellente rapporto energia/peso, ma richiedono una gestione attenta: mal gestite, possono gonfiarsi, incendiarsi o esplodere.
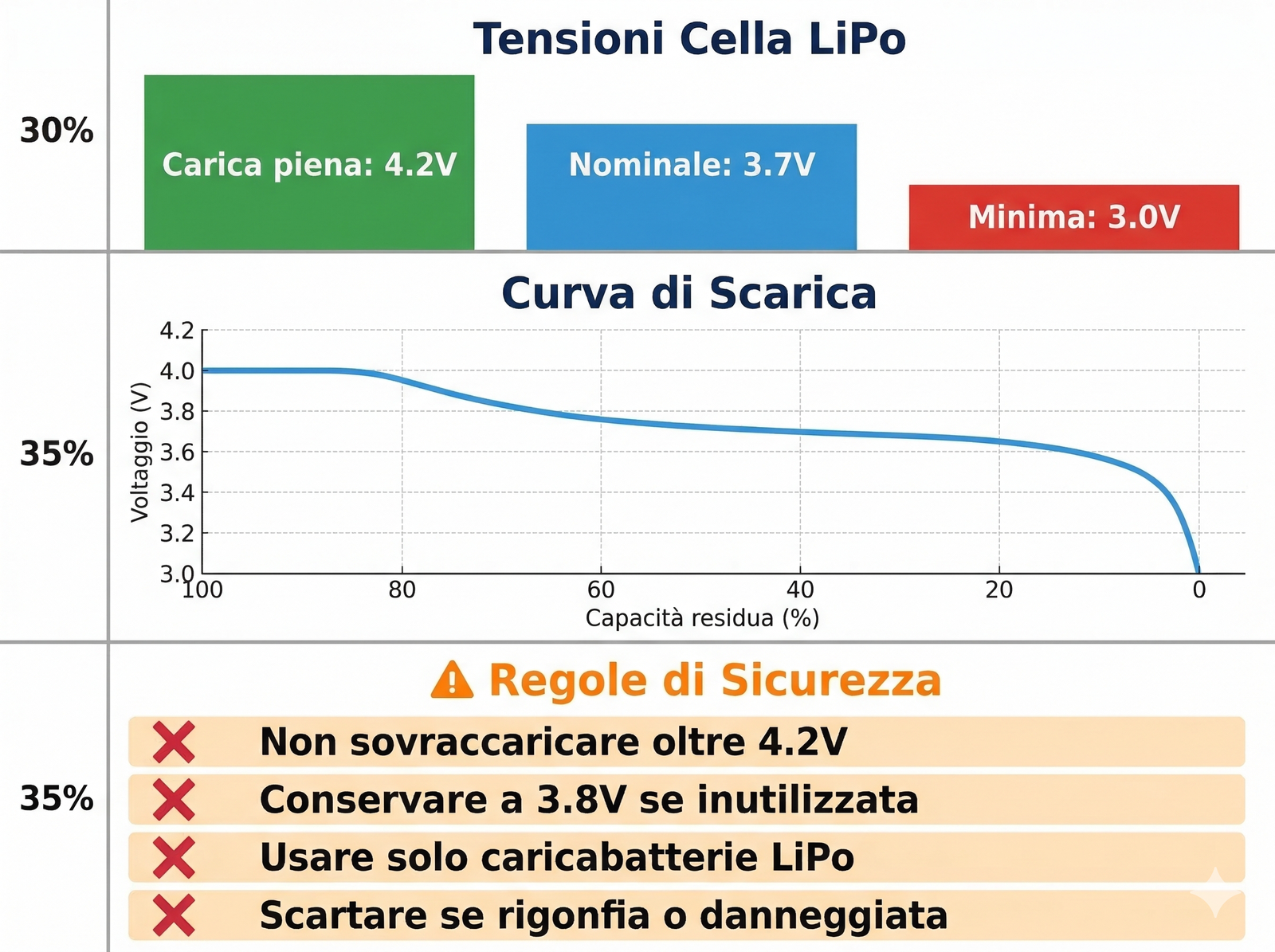
Voltaggio e stato di carica
Conservare a ~3.85V/cella se non si usa per più di 3 giorni
Max 1C (es. batteria 5000mAh → carica max 5A)
Non caricare sopra 45°C o sotto 5°C
Non lasciare la batteria in carica senza sorveglianza
Segnale di cella danneggiata: smaltire subito come RAEE
Non gettare nei rifiuti urbani: centri RAEE o negozi elettronica
Terminologia batterie: celle, S e mAh
- Cella: unità base LiPo, tensione nominale 3.7V. Le celle sono collegate in serie per aumentare il voltaggio totale
- Numero S: indica il numero di celle in serie. 1S=3.7V, 2S=7.4V, 3S=11.1V, 4S=14.8V, 6S=22.2V. La maggior parte dei droni consumer usa 3S o 4S
- mAh (milliampere-ora): la capacità della batteria. Una batteria da 5000mAh eroga 5A per 1 ora (o 10A per 30 minuti). Maggiore la capacità → maggiore autonomia, ma anche maggiore peso
- C-rating: indica la velocità massima di scarica. Una batteria 5000mAh con 25C può erogare 5000 × 25 = 125A. Importante per droni da corsa, meno critico per droni fotografici
- LiHV: variante ad alta tensione della LiPo. Tensione nominale 3.8V/cella, massima carica 4.35V/cella. Maggiore densità energetica, richiede caricabatterie specifico
⚠️ Incendio LiPo: cosa fare
Le batterie LiPo in fiamme non possono essere spente con acqua (reagisce violentemente con il litio) né con estintori CO₂ comuni. Usare sabbia o estintori a polvere chimica. Ideale: tenere una LiPo Safe Bag (sacchetto ignifugo) nella borsa da campo. In caso di surriscaldamento esterno, portare immediatamente il drone in un'area aperta lontano da materiali infiammabili.
Sezione 3
Motori Brushless ed ESC
I droni moderni usano quasi esclusivamente motori brushless (senza spazzole) alimentati da un ESC (Electronic Speed Controller). Questa coppia di componenti determina le prestazioni e l'efficienza del drone.
Come funziona il motore brushless
Un motore brushless è un motore elettrico trifase in cui le bobine (statore) sono fisse e i magneti permanenti (rotore) girano. Poiché non ci sono spazzole di contatto, l'usura è minima e l'efficienza altissima (85–95%). La rotazione è controllata dall'ESC che genera sequenze di impulsi elettrici sulle tre fasi.
Terminologia motori
- KV (kilovolt): numero di giri al minuto per ogni Volt applicato. Un motore 2300KV alimentato a 11.1V (3S) gira a ~25.500 RPM. Motori high-KV = giri alti + eliche piccole (droni racing). Low-KV = giri bassi + eliche grandi (droni fotografici → più efficienza)
- Statore: parte fissa del motore con le bobine elettromagnetiche
- Rotore (campana): parte esterna che ruota, porta i magneti permanenti
- ESC (Electronic Speed Controller): centralina che converte il segnale di controllo del flight controller in corrente trifase per il motore. Ogni motore ha il suo ESC dedicato
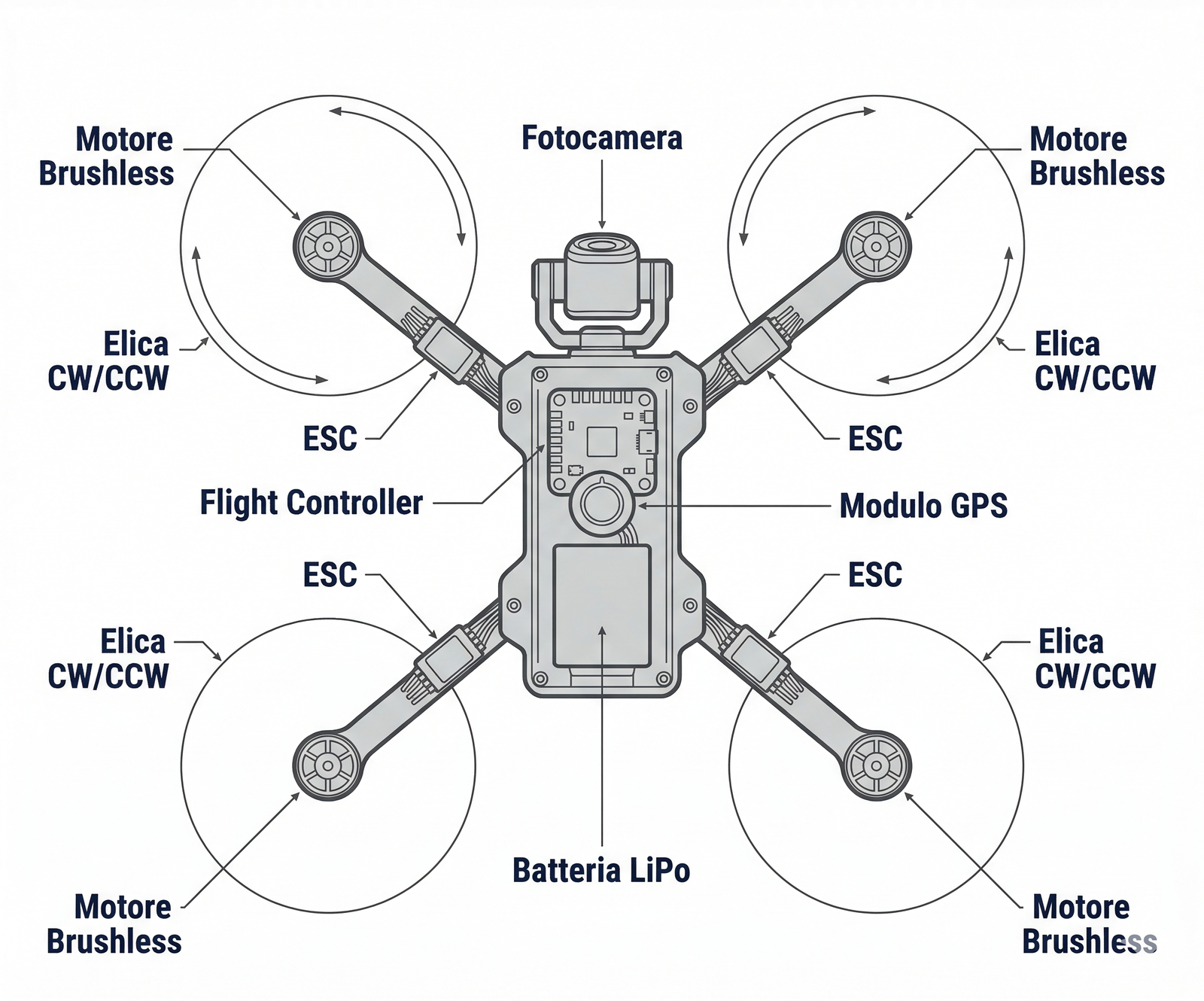
Rotazione delle eliche in un quadricottero
In un quadricottero, i quattro motori girano a coppie opposte per annullare le coppie di reazione e mantenere il drone stabile in hovering:
- Motori anteriore sinistro + posteriore destro: senso orario (CW)
- Motori anteriore destro + posteriore sinistro: senso antiorario (CCW)
- Ogni motore usa un'elica specifica: le eliche CW e CCW NON sono intercambiabili (montarle al contrario non genera portanza)
💡 Come controllare le eliche prima del volo
Prima di ogni volo, ispezionare visivamente le eliche: cercare crepe, scheggiature, piegature o danni da impatto. Un'elica danneggiata crea vibrazioni che danneggiano i motori e i sensori (IMU, barometro). Se c'è anche il minimo danno visibile: sostituire immediatamente. Le eliche sono componenti di sicurezza, non di comfort.
Sezione 4
Sistemi di Controllo
Un drone è governato da una catena di sistemi di controllo che va dal radiocomando nelle mani del pilota fino agli ESC che alimentano i motori. Comprendere questa catena è fondamentale per diagnosticare problemi e volare in sicurezza.
La catena di controllo
- Radiocomando (TX): il telecomando nelle mani del pilota, trasmette i comandi via radio (2.4 GHz o 5.8 GHz)
- Ricevitore (RX): sul drone, riceve i segnali radio e li trasmette al flight controller
- Flight Controller (FC): il "cervello" del drone. Riceve i comandi del pilota, legge i sensori (IMU, barometro, GPS) e calcola la potenza da inviare a ogni ESC per eseguire il movimento richiesto mantenendo la stabilità
- ESC (4x): convertono il segnale del FC in corrente per i motori
- Motori (4x): generano la spinta tramite le eliche
Sensori principali del Flight Controller
🧭 IMU (Inertial Measurement Unit)
📡 GPS/GNSS
🌡️ Barometro
🧲 Bussola (Magnetometro)
Data link e canali di comunicazione
La comunicazione tra radiocomando e drone avviene tipicamente a 2.4 GHz per il controllo (alta affidabilità, bassa latenza) e a 5.8 GHz per il video FPV (alta banda, ma minore penetrazione ostacoli). Sistemi più avanzati come DJI OcuSync/O3 usano tecnologie proprietarie per massimizzare portata e stabilità del link.
Sezione 5
Modalità di Volo: GPS, ATTI, Manual
Quasi tutti i droni moderni offrono più modalità di volo che determinano quanto il flight controller assiste il pilota. Conoscere le differenze è fondamentale per volare in sicurezza, soprattutto in caso di emergenza.
| Modalità | Sensori attivi | Stabilità | Quando usarla |
|---|---|---|---|
| GPS / P-MODE | GPS + IMU + Barometro + Bussola + Vision | Massima. Hover stazionario automatico, correzione deriva, ritorno automatico | Uso normale, volo fotografico, operatori alle prime armi |
| ATTI / ALTITUDE | IMU + Barometro (no GPS) | Media. Mantiene quota automatica, ma può derivare lateralmente col vento | Indoor (no GPS), aree con interferenze GPS, piloti esperti |
| MANUAL / ACRO | Solo IMU grezzo | Nessuna assistenza automatica. Il drone fa esattamente quello che comanda il radiocomando | Droni da corsa FPV, piloti molto esperti — sconsigliato per operazioni VLOS standard |
⚠️ Perdita del segnale GPS in volo
Se il segnale GPS viene perso durante il volo (zona urbana densa, interferenze, meteo geomagnetico), il drone passa automaticamente in modalità ATTI. In questa modalità il drone non si posiziona più automaticamente e può derivare col vento. Il pilota deve essere pronto a gestire manualmente posizione e quota. Esercitarsi periodicamente in modalità ATTI in aree aperte è buona pratica professionale.
Sistemi di navigazione ausiliaria
- Vision Positioning System (VPS): fotocamere rivolte verso il basso che riconoscono texture del suolo per un hovering preciso anche senza GPS (efficace fino a circa 10 m dal suolo)
- Obstacle Avoidance: sensori (infrarosso, ultrasuoni, stereo-vision) che rilevano ostacoli e bloccano o aggirano il drone. Non sostituisce la vigilanza del pilota
- Follow Me / Active Track: il drone segue automaticamente un soggetto rilevato dalla fotocamera. Non può essere usato vicino a persone in operazioni Cat. Aperta senza rispettare le distanze minime
Sezione 6
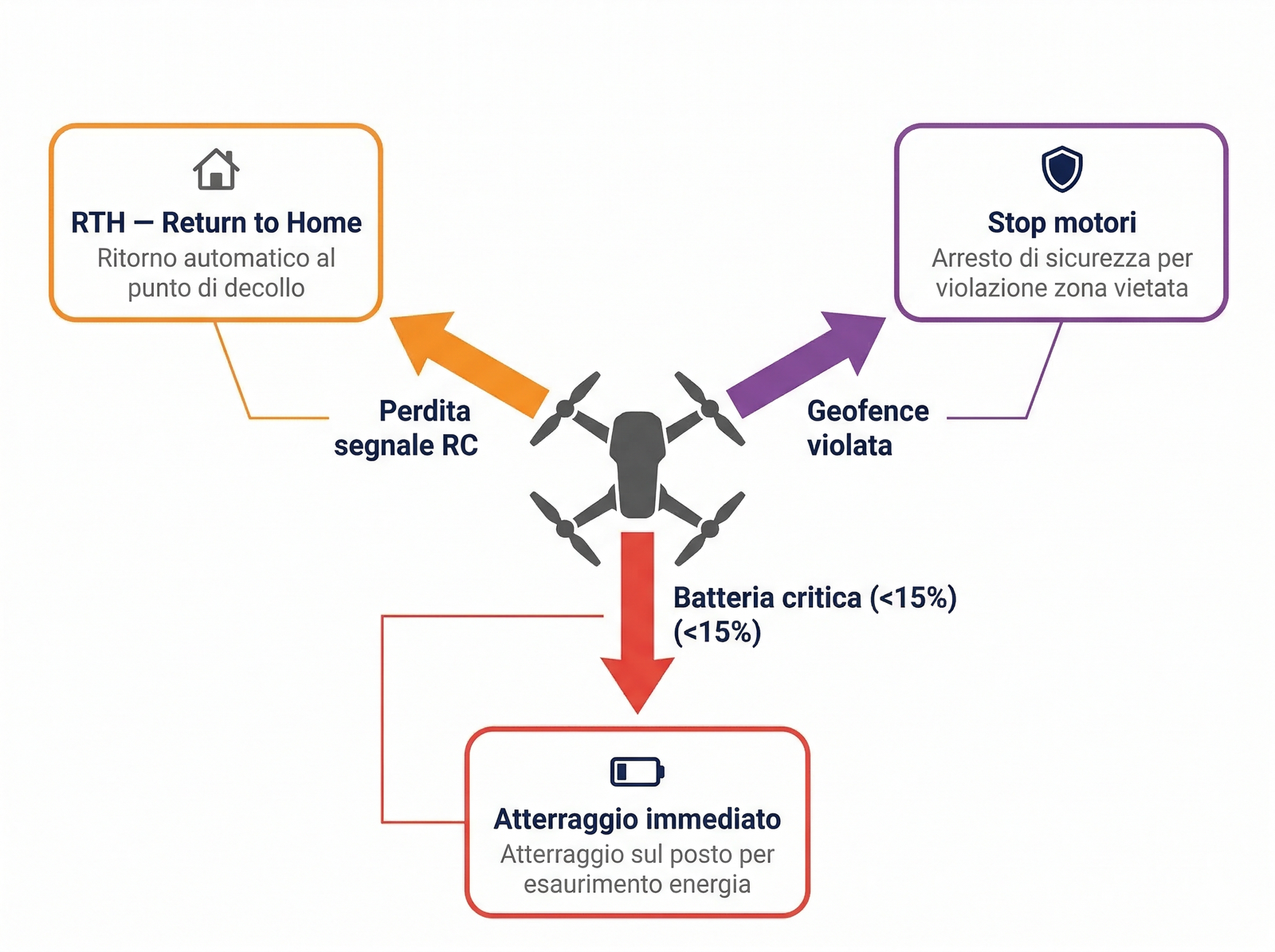
Sistemi Fail-safe
I sistemi fail-safe sono comportamenti automatici di emergenza che il drone esegue quando si verifica una condizione anomala (perdita di segnale, batteria critica, uscita dalla zona autorizzata). Sono componenti di sicurezza obbligatori per i droni di Classe C1 e superiori.
✅ Test fail-safe obbligatorio pre-volo
Prima di ogni missione professionale, verificare: (1) il Home Point è stato registrato correttamente, (2) la quota di sicurezza RTH è impostata sopra qualsiasi ostacolo nelle vicinanze, (3) la batteria RTH è calibrata (il drone deve avere batteria sufficiente per tornare). Il test manuale del RTH (azionamento del pulsante fisico) è parte della checklist pre-volo.
Sezione 7
MTOM, Geofencing e U-Space
Il MTOM (Maximum Take-Off Mass) è il peso massimo al decollo del drone incluso payload, batteria e qualsiasi accessorio. È il parametro normativo chiave che determina la classe UAS e le operazioni permesse.
MTOM: il parametro chiave del regolamento
- MTOM < 250 g: Classe C0 — nessuna registrazione operatore, nessuna e-ID. La maggior parte dei mini-droni consumer (DJI Mini 2 SE: 249g)
- MTOM < 900 g: Classe C1 — registrazione e-ID obbligatoria, Categoria A1
- MTOM < 4 kg: Classe C2 — GVC richiesto per A2, low-speed mode obbligatorio
- MTOM < 25 kg: Classi C3/C4 — solo Categoria A3 (lontano da aree abitate)
- MTOM ≥ 25 kg: Categoria Specifica o Certificata — autorizzazione ENAC obbligatoria
💡 Come calcolare l'MTOM reale
L'MTOM deve includere tutto ciò che è a bordo al decollo: peso base del drone + batteria + eventuale fotocamera/gimbal aggiuntiva + payload (spruzzatore, speaker, sensori). Se un drone ha MTOM dichiarato di 249g ma monta un accessorio da 5g, diventa 254g e supera la soglia C0. Pesare sempre la configurazione completa di volo.
Geofencing
Il geofencing è un sistema software che crea confini virtuali nello spazio aereo. I droni con geofencing integrato (obbligatorio per Classi C1+) ricevono dati sulle zone geografiche UAS e impediscono automaticamente l'ingresso in zone vietate.
- Geofencing hardware: il drone fisicamente non può volare in zone rosse (es. aeroporti) — i motori vengono bloccati o il drone viene frenato al confine
- Geofencing software (advisory): avvisi e notifiche, ma il pilota può ignorarli (non raccomandato e potenzialmente illegale)
- Aggiornamento database: il geofencing si basa su database scaricati via app. Aggiornare sempre l'app prima del volo per avere le zone più recenti
U-Space: il futuro dello spazio aereo drone
U-Space è il framework europeo per la gestione digitale dello spazio aereo a bassa quota dedicato ai droni. Definisce servizi digitali obbligatori per gli operatori UAS:
- Network Identification: trasmissione in rete della posizione e identità del drone in tempo reale (evoluzione dell'e-ID)
- Geo-awareness: il drone riceve in tempo reale informazioni sulle zone geografiche UAS attive
- Traffic Information: visibilità degli altri droni nello stesso spazio aereo
- Flight Authorisation: richiesta e approvazione digitale automatica delle autorizzazioni di volo
In Italia, D-Flight è il Service Provider U-Space designato da ENAC/ENAV per le operazioni UAS.
📚 Riepilogo — Cosa ricordare
- Tre tipologie UAS: multirotore (VTOL, hover preciso, autonomia breve), ala fissa (lunga autonomia, no hover), VTOL ibrido (meglio dei due)
- Batterie LiPo: cella nominale 3.7V, max 4.2V, danger sotto 3.5V, storage charge a 3.85V. Mai caricare incustodito, smaltire subito se gonfie
- Numero S = celle in serie: 1S=3.7V, 2S=7.4V, 3S=11.1V, 4S=14.8V. Il mAh determina la capacità/autonomia
- Motori brushless controllati da ESC. In un quad, 2 motori CW + 2 CCW. Eliche CW e CCW non sono intercambiabili
- IMU (giroscopio + accelerometro), GPS (min 6 satelliti per fix stabile), barometro (quota relativa), bussola (heading): i 4 sensori chiave del flight controller
- Modalità GPS: massima assistenza. ATTI: mantiene quota ma non posizione. Manual/Acro: nessuna assistenza
- Fail-safe principali: RTH (ritorno al home point), Hover, Land automatico, Lost Link sequence
- MTOM include tutto il peso a bordo: drone + batteria + payload + accessori. Soglie chiave: 250g, 900g, 4kg, 25kg
- Geofencing obbligatorio per Classi C1+. U-Space è il sistema europeo di gestione digitale dello spazio aereo drone